こんにちは!
安川電機さんのロボットコントローラYRC1000はオプションではありますが、CC-Linkに対応しています。
今回は安川電機さんのロボットコントローラYRC1000と三菱さんのPLCのiQ-Rシリーズ間でCC-Linkの設定を行ったので、設定時に躓いたことを元にCC-Linkの設定方法を記事にしました。
では以下の詳細を見ていきましょう!
安川電機のロボットはCC-Link IEフィールドやEtherNet/IPなどメジャーな産業ネットワークにはだいたい対応しています。(オプション含む)購入時にロボット側の設定方法のマニュアルもついてきます。
(スポンサーリンク)
YRC1000でCC-Linkで接続するための準備
安川さんのロボでCC-Linkを使うには購入時にオプション機能の追加が必要になります。
機器間の通信にCC-Linkを使うのであれば、CC-Link用の基板の取り付けが必要なので購入時にオプションで付けてもらいましょう。
ハード的な接続はロボットコントローラの中にあるコネクタにCC-Linkの専用ケーブルを配線するだけです。
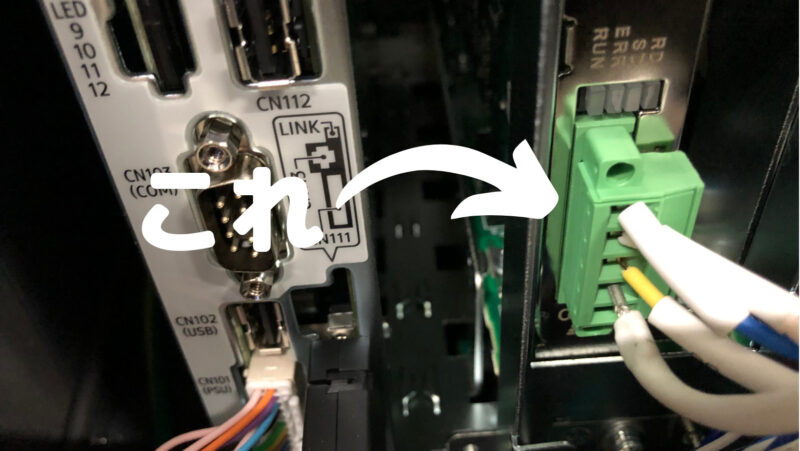
購入時についているショートタイプのマイナスドライバもしくは精密ドライバのマイナスを使ってコネクタを取り外してください。
僕は初めて見たとき、これコネクタ取れるんだーと思いました笑
電気屋さんからすれば常識なんでしょうね笑
ロボットがCC-Linkの終端となる場合は終端抵抗を準備しておきましょう。
ちなみに抵抗は差し込むリードタイプです。
マニュアルの通りYRC1000から設定
ティーチングペンダントの「メニューボタン」を押しながらロボットの電源を起動し、メンテナンスモードを立ち上げたらマニュアルの通りにCC-Linkの設定画面に行きましょう。
メンテナンスモードの入り方って忘れがちですよね。
基本的にロボット側の設定は安川さんのCC-Link接続マニュアル通りです。
マニュアルは購入時についてくるUSBの中にあります。
PLC側の設定は三菱電機さんのCC-Linkの接続マニュアル通りです。
マニュアルは三菱さんのサイトからダウンロード可能です。
CC-Linkの規格としてはVer.2.00にも対応しています。
ケーブルやCC-Linkの設定項目の説明については以下の記事を参考にどうぞ。
ちなみにオプション基板はリモートデバイス局になります。
リモートデバイス局とは簡単に言うとIOもデータレジスタもやりとりできる機器です。
YRC1000では三菱PLCでお馴染みの「RX」「RY」「RWw」「RWr」という概念があります。
RXはYRC1000の外部入力の2xxxxに対応していて、RYは外部出力3xxxxに対応しています。
汎用用途ロボットの初期状態の場合だと20070、30070が入出力の1番目に当たります。
ハンドリング用途などは異なるのでCC-Linkの接続マニュアルを確認してください。
また、割付は変更することも可能です。
RWwとRWrはロボットのMレジスタに当たります。
何番から割り当てるかは設定できます。
外部入出力の割り当ての設定はカスタムできますが基本的に安川電機さんの初期設定をそのまま使用した方が無難です。
ただし、CC-Linkで外部のタッチパネルなどからスタートさせる場合は割り当てを使用してカスタマイズするかコンカレントIO(コンカレントラダー)を使用する必要があります。
コンタクトセンターに要望を伝えると電話越しにどこをどう変えればいいか相談に乗っていただけるので積極的に活用しましょう。
コンカレントI/Oについてはこちらの記事を参考にどうぞ。

設定時の注意点
慣れている人や電気屋さん、制御屋さんからすると当たり前の話かもしれませんが、CC-Linkでの使用可能点数はロボットで使えるレジスタの数ではありません。
例えばVer.1.00を使用して4局占有だと、RX、RYの使用可能点数は128点ずつです。
RWw、RWrのレジスタの使用可能点数は16点ずつです。
ロボット側の使用可能なMレジスタデバイスは1000個使えますが、上記の設定ではPLCなどとやりとりできるMレジスタは入出力合わせて32個しか使えません。
僕はあまりなじみがなかったので、レジスタが使える数が意外と少ないと感じました。
例えば位置座標を取得するために2ワード(Mレジスタ2個分)で使うと、ロボットの場合6軸あるので計12点(12ワード)使います。
するとこの時点で残りは4点になります。
レジスタやIOを多く使うような場合はVer.2.00を使うのが無難です。
ただ、PLCやロボットなどで処理を工夫して使用する点数を減らせることもあるので検討してみてくださいね。
ただし親となるPLCがVer.1.00の場合、Ver.2.00で設定してしまうとPLC間のCC-Linkで通信エラーが出るので気をつけてください。